My
Pocket Calculator project has been on the back burner for a few months while I finish my master's thesis. In the mean time, I got interested in doing a much simpler project to make a very small calculator that will hopefully be about 2.5 inches long. This is the size of a 5x5 keypad and the small 128x32 LCD I want to use. Like my first
first calculator, it will use a through hole
MSP430. The first calculator needed two MSP430s to contain all the firmware, but I think I can fit everything on one chip for this project. It should also be possible to do what I want with the 512 bytes of internal RAM the chip has, so I won't need any external SRAM, and with 25 keys, I also won't need external shift registers. Other than the microcontroller and some capacitors, the only other thing on the board will be a CR2032 battery. The MSP430 needs 2.7v to run at 16MHz, so I plan to run at 8MHz in order to use the battery down to 2.4v. It might be possible to monitor the battery and run at 16MHz as long as the voltage is high enough, but I don't think I will need the extra speed like I did on the last calculator.
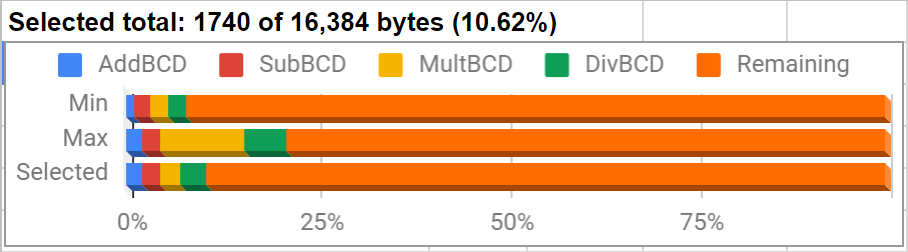
One of the main things that got me interested in this project was finding out that the MSP430 has a decimal add instruction that works on packed BCD words. This is really convenient and should be many times faster than doing BCD manually in C like I did for my first calculator. One possibility would be mixing C and assembly to take advantage of features like this, but I am going to try to do the whole thing in assembly to make it as small and fast as possible. Another speed up should come from switching to a 16 byte floating point format. This will let me calculate logarithms and trig functions to the same precision as my first calculator but fit everything in the 512 bytes of internal RAM. Eliminating the bottleneck of transferring data over SPI one bit at a time will probably be the main speed up. For multiplication, I want to try some of
the algorithms I tested for the 6502, and for division, I will try out some based on Netwon's Method. For logarithms and trig functions, I'll probably use CORDIC routines again, but I want to see if Taylor polynomials will be much smaller, even if they are slower. With 25 keys, I can fit in just about everything from my first calculator. It should be able to do a little more than an
HP-35. The main drawback compared to my first calculator will be less precision with large numbers and less stack space, although neither should be a problem, since there won't be a programmable mode. Also, I plan to keep track of exponents by the byte, rather than the nibble like a did on the first calculator. This will mean losing precision by a factor of 10 in some cases, but it will make aligning numbers during calculation much simpler.